طریقه چیدمان سنسورها در ربات مسیریاب
ربات مسیریاب باید روی یک سطح سفید که یک خط مشکی روی آن کشیده شده است یا بلعکس حرکت کند و باید بتواند خط مشکی را تعقیب کند.در این میان ممکن است بریدگی هایی به عرض کوچک ویا مسیرهای با زاوریه ۹۰ درجه و مسیرهای بشکل دایره و شیب دار و مانع وجودداشته باشد که ربات باید این مسیرها را تشخیص داده و به مسیر خود ادامه دهد. ما با استفاده از الگوریتم و برنامه نویسی که برایربات انجام می دهیم، نحوه حرکت ربات را تعریف می کنیم.
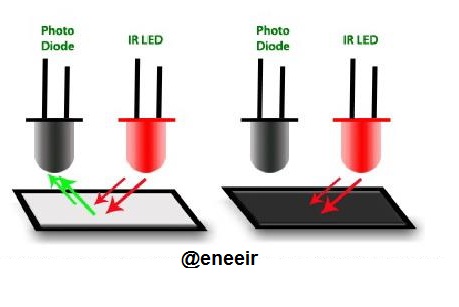
در ربات های مسیریاب از سنسور های مادون قرمز برای تشخیص خطوط استفاده می شود. این ﮔﻮﻧﻪ از ﺳﻨﺴﻮر ها از ﻳﻚ ﻓﺮﺳﺘﻨﺪﻩ و ﻳﻚ ﮔﻴﺮﻧﺪه ﻣﺎدون ﻗﺮﻣﺰ ﺗﺸﻜﻴﻞ ﺷﺪﻩ اﺳﺖ. ﭘﺮﺗﻮ های نور ﻣﺎدون ﻗﺮﻣﺰ ﺗﻮﺳﻂ ﻓﺮﺳﺘﻨﺪﻩ ارسال می شود و ﺑﻪ ﺳﻄﺢ ﺑﺮﺧﻮرد ﻣﻲ کند و ﺑﺎزﺗﺎب ﺁن ﺗﻮﺳﻂ ﮔﻴﺮﻧﺪﻩ درﻳﺎﻓﺖ ﻣﻲ ﺷﻮد. اﻳﻨﮕﻮﻧﻪ از ﺳﻨﺴﻮرها ﺑﻪ دﻟﻴﻞ اﻳﻨﻜﻪ ازﻣﺤﻴﻂ اثر کمی می گیرند، درﺻﺪ ﺧﻄﺎی ﺑﺴﻴﺎر ﭘﺎﻳﻴﻨﻲ دارﻧﺪ.
طریقه کارکرد سنسورهای مادون قرمز به این صورت می باشد که سنسور فرستنده امواج مادون قرمز را تولید و ارسال می کند و این امواج اگر به صفحه سفید برخورد کننده بازتاب دارند ولی صفحات مشکی مانع بازتاب شده و این امواج را جذب می کنند.در شکل زیر نحوه ارسال امواج نشان داده شده است.
سنسورهای مادون قرمز
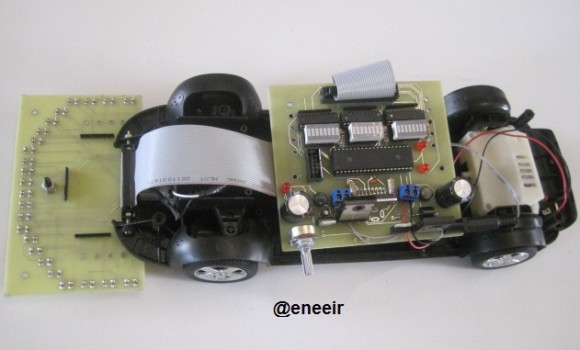
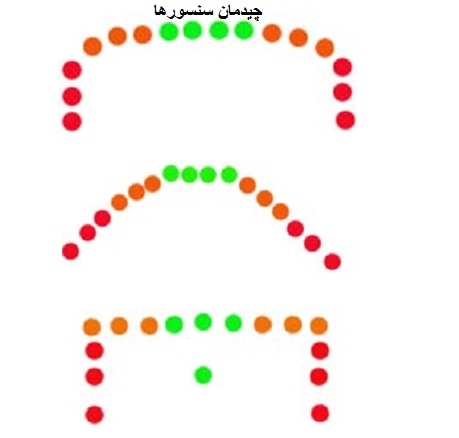
قرار گیری سنسورها
قرار گیری سنسورها روی برد را می توان به سه قسمت تقسیم نمود.قسمت اول سنسورهای وسط می باشد که برای حرکت ربات روی خط صاف استفاده می شود.این سنسورها انحراف های کوچک را تشخیص داده و مسیر حرکت رباط را اصلاح می کنند.قسمت دوم سنسورهای کنارین سنسورهای وسط می باشند و در مواقعی که ربات انحنای بیشتری از مسیر داشته باشد این سنسورها وارد عمل شده و حرکت ربات را اصلاح می کنند.قسمت سوم سنسورهای کناری می باشد که این سنسورها بیشتر در انحانای تند و خط های 90 درجه وارد عمل می شوند.
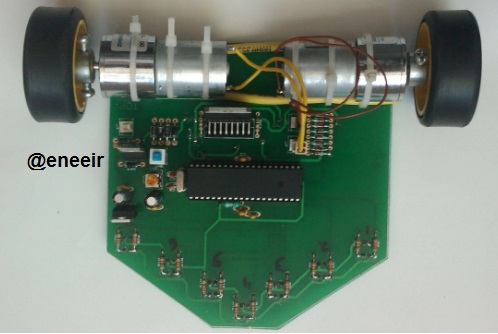
تعداد سنسورها
بهترین تعداد سنسور برای یک ربات مسیر یاب 13 عدد می باشد و برای مسابقه 15 عدد که ربات توسط آن ها می تواند خطها را تشخیص داده و حرکت نرمی داشته باشد.دقت کنید که افزایش تعداد سنسورها به معنی بهتر بودن ربات نیست.همچنین افزایش تعداد سنسور افزایش مصرف باتری را نیز در پی دارد.همچنین کم بودن سنسورها نیز برای ربات مشکل ایجاد می کند و در انحناهای بیشتر ممکن است ربات منحرف شود و همچنین ربات از حرکت نرمی برخوردار نیست در کم بودن سنسورها.
همچنین توجه داشته باشید که اگر فاصله سنسورها از یکدیگر کم باشد سنسورها روی یکدیگر اثر می گذارند و ربات ممکن است با مشکل مواجه شود و همچنین زیاد بودن فاصله سنسورها از یکدیگر باعث می شود که حرکت ربات به صورت زیگزاگ باشد.